
2021年7月10日上午,华中科技大学人工智能与自动化学院的赵金教授和他的博士应邀来我院进行学术交流,在J06A505会议室为我院师生做了一场题为“基于多模预测与微动控制的智能体协同任务仿真平台研发”的学术报告。报告会由钱同惠教授主持,我院师生20余人参加了报告会。

赵金教授首先介绍了当前国内外全自主无人艇多源环境感知与智能控制的研究情况,然后从全自主无人艇总体研究路线出发,分别从环境感知、单艇控制、多艇协同、系统集成四个方面介绍了全自主无人艇的关键技术。重点分析了目前所存在的问题,即水域环境较为复杂,执行任务中环境因素对任务目标影响大,强调要利用全自主控制技术实现无人艇在实际环境中执行复杂任务。
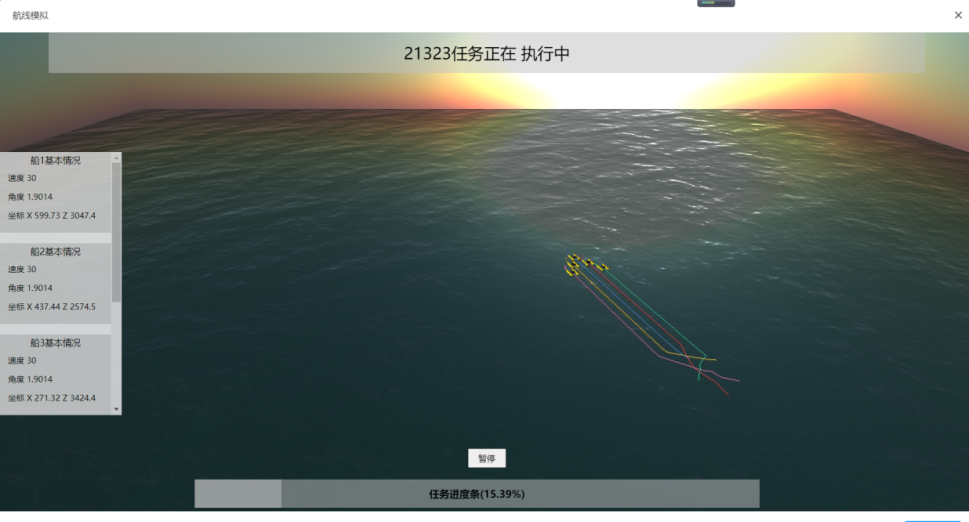
随后,由赵金教授团队的李士杰博士展示了水面智能体协同研究平台,该平台以无人艇为载体,重点关注智能体的队形协同控制,该软件能够让使用者对多智能体协同有直观的认识,并为研究人员提供相应的研究平台。在算法层面,采用领航跟随的方法,对领航者及跟随者采取不同的控制策略,以达到路径规划及队形控制的效果。演示版本初步实现了针对教学使用的智能体协同演示的要求,能够根据演示需要设置相关参数,输出对应演示动态模型,并对航行过程中的协同控制相关参数进行展示。
本次报告会让学院师生们聆听到了全自主无人艇研究的前沿思路,在场师生积极提问,与赵金教授无人艇研发团队展开了热烈讨论,学生们纷纷表示获益匪浅。报告结束后,钱同惠教授对赵金教授团队的精彩报告表达了感谢,此次报告会取得了圆满成功。

赵金教授简介:华中科技大学人工智能与自动化学院教授,博士生导师;IEEE高级会员,中国自动化学会电气自动化专业委员会和中国电工技术学会电控系统与装置专业委员会委员。主持和参加了国家自然科学基金项目、国防预研项目和企业委托研发项目等各类科研项目。五项科研成果通过省部级主持的专家鉴定,科研成果获得教育部科技进步二等奖一项、“日内瓦国际发明展金奖”两项。教学成果获得湖北省高等学校教学成果一等奖和三等奖各一次。以第一作者或通讯作者在国内外权威刊物和会议上发表学术论文200余篇,其中SCI收录20余篇,编写教材一部,合译国外专著一部。已获授权国家发明专利20余项。